技術コラム【吐出の羅針学】サーボモーター
液体移送用のポンプでは駆動機として汎用モーターがよく使われていますが、FA(ファクトリーオートメーション:製造ラインの自動機械)には駆動機としてサーボモーターが使われています。そのモーターの使い分けを理解していただくために、サーボモーターについて数回に分けて説明します。今回はサーボモーターの概要についてです。
なお、駆動機やモーターの説明については移送に関するコラム集「移送の学び舎 駆動機」で講義をしておりますので、そちらをご覧ください。
サーボの由来
指令通りの動きをするものをサーボ機構と呼んでいますが、このサーボとはどういう意味でしょう。その昔、多くの奴隷を使って巻き上げ機をまわして大きな石を運んだりしたことから、サーボの語源はラテン語のSERVUS/奴隷(英語のservant/召使)に由来しているといわれています。
サーボモーターとは
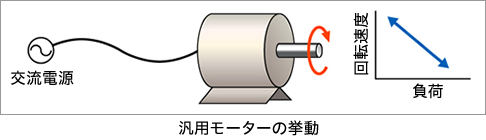
汎用モーターは三相交流電源に接続すると回転します。つまり電気エネルギーを回転運動に変換し、動力を発生させています。このモーターは負荷が変化しなければ一定の速度で回転しますが、負荷が小さくなれば回転速度が上がり、大きくなると速度が下がってしまいます。
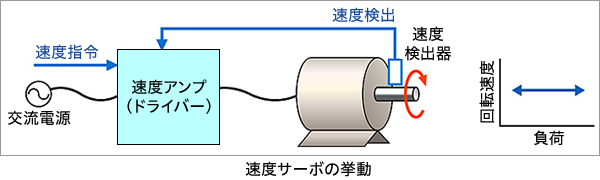
こうした負荷変動による速度変化への対応策が速度サーボです。速度サーボであれば、負荷が変動しても希望の速度で回転させることができ、さらに指令通りに回転速度を変化させることもできます。速度サーボに必要な機器は速度検出器と速度アンプ(ドライバー)です。速度アンプはモーターを速度指令通りに回転させるため、検出器からの速度信号を受け、指令と実速度が一致するようにモーターへ印加する電気(電流、電圧や周波数:モーターの種類で決まる)を変化させます。
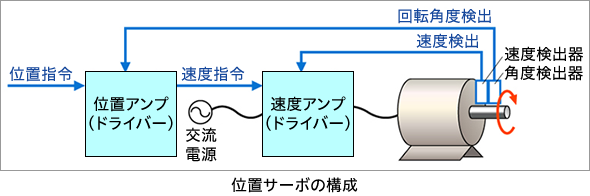
回転速度だけでなく回転量(回転角度)まで制御するには位置サーボが必要になります。位置サーボであれば、希望の回転量まで回転させた後、その位置を保持することができます。機器構成としては、速度サーボにモーター回転角度の検出器と位置制御アンプを追加した形になります。
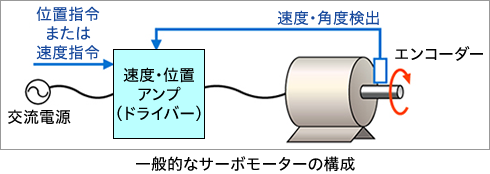
このように、速度や位置を制御する機能を持ったモーターをサーボモーターと呼びます。サーボモーターには速度や回転角度の検出器が付属し、速度や位置を制御するアンプ(ドライバー)と組み合わせて使用されます。
最近のものは検出器にエンコーダーを使用して速度と位置の両方を検出し、ドライバーは位置制御、速度制御のいずれかを選択できる方式が一般的になっています。
またモーター自体も汎用モーターよりも速度の応答性が改善された同期モーターを使用することが一般的です。
サーボモーターの種類
1. DCサーボモーター
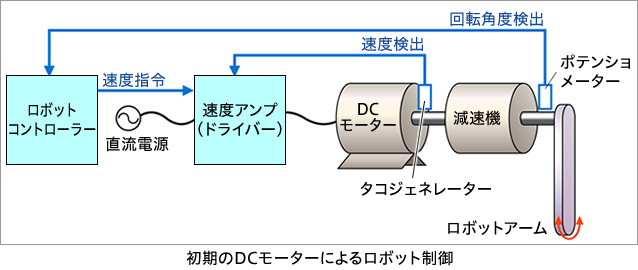
サーボモーターが最もよく利用されているのが産業用ロボットですが、そのロボット用に最初に実用化されたのはDCサーボモーターです。実用初期の頃は、おもちゃなどの動力として使用されるDCモーターに速度を検出するタコジェネレーターを組み合わせて、専用の速度アンプによって制御しました。これをロボットのアーム駆動に使用する場合は、その軸にポテンショメーター(抵抗トリマー)を組み込んで、回転角度を検出して位置制御をしました。
2. ACサーボモーター
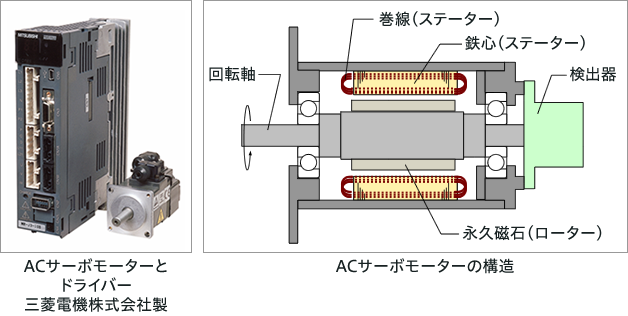
DCサーボモーターはブラシが摩耗することにより、保守性や信頼性に問題があるといわれています。その問題を解決したのがACサーボモーターです。巻き線と磁石の位置関係をDCサーボモーターと逆にすることによって、機械式スイッチであったブラシを排除し、巻線に流す電流が連続的に制御できるようになったため、制御性が向上しました。位置・速度検出器としてパルスエンコーダーを組み込んであり、専用ドライバーで位置制御や速度制御またはトルク制御ができます。ACサーボモーターは巻線の高密度化、マグネットの特性や絶縁技術の進歩により、DCサーボモーターに比べて飛躍的に小型化されてきています。今日では、サーボモーター=ACサーボモーターと呼ばれているほどポピュラーなものになっています。
3. ステッピングモーター(永久磁石型)
プリンターの駆動部やスロットマシンの回転部などにはステッピングモーターが使用されています。これまで説明したモーターは磁界で回転力が発生することを利用したものですが、ステッピングモーターは固定子の磁力と回転子の磁力の吸引力を使用して回転位置を保持するものです。固定子の磁界を円周上にずらしていく(ステップ)と、それにつれて回転子も動きます。時計の駆動に使用されるモーターもこのステッピングモーターです。時計の秒針は1回転(1分)を60ステップで動いていると想像していただくと、その動きが理解できると思います。
このモーターへの指令は回転させたいステップ数だけのパルスをドライバーに入力します。ステッピングモーターは、ローターとステーターの磁極の刻みを1ステップずつ動いていくので、位置検出器なしで位置決めが可能です。しかし、位置保持力が弱いのでACサーボモーターなどに比べると、位置がずれやすい(脱調といいます)という弱点があります。ステッピングモーターはこの脱調があるのでサーボモーターとは区別されていますが、位置サーボをするためのモーターですので、広義ではサーボモーターのひとつと考えてよいでしょう。
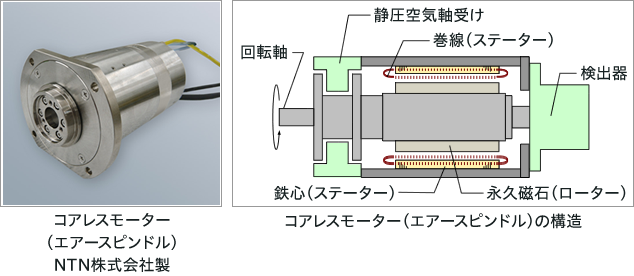
4. コアレスモーター
高速スピンドル用途で定速性や振動の低減に対応するために使用されています。ACサーボモーターとは異なり、ステーターのティース(コイルを巻く芯)が無い形状をしているので、コギング(磁石ローターとステーターの鋼板部分の磁力による振動)が発生しません。この長所を生かして、静圧空気軸受との組合せによりナノメートル級の振れ精度を持つエアースピンドルが商品化されています。
5.DDモーター
ACサーボモーターを使って大きなトルクを必要とする場合や、サーボモーターの回転角度検出器の最小検出角度より分解能を上げようとする場合には、減速機を組み合わせて使用します。しかし、減速機のバックラッシュや出力の損失が生じることが問題になる場合があります。DD(ダイレクトドライブ)モーターはモーターの磁器回路の工夫や形状によって、減速機なしでより大きなトルクを出したり、1回転を100万分割以上にできる検出器を組み込むことによって回転角度の分解能を高くしています。
DDモーターの代表例として以下のようなものがあります。
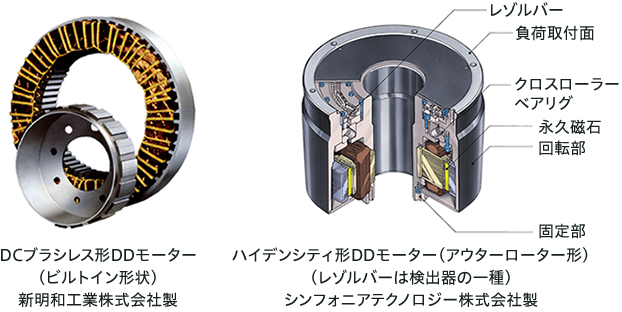
- モーターのトルク変動が小さいという特長を持った、ACサーボモーターと同じ構造のDCブラシレス形DDモーター(ビルトイン形状)
- 位置停止精度が高いという特長を持った、ステッピングモーター回転子に歯車状の鉄心を使用しているバリアブルリラクタンス形DDモーター(VR形)
- モーター効率を向上させたるために、バリアブルリラクタンス形にマグネットを組み込んだハイブリッド形DDモーター(HB形)
- HB形の磁器回路を工夫し、高トルクに特化したハイデンシティ形DDモーター(HD形)
2.、3.、4.のモーターはアウターローター(モーターの外周部が回転する構造)が主流です。この構造は力の発生点の半径が大きくなるので、トルク=半径×力の関係から出力トルクを大きくできます。逆に、1のモーターをアウターローターにすると隣り合ったティースの隙間が大きくなり、トルクのリップルが大きくなってしまいます。この理由で、1の方式ではインナーローター(モーターの中心側が回転する構造)が主流です。